LiDAR против робота-гироскопа: инженерный план обеспечения точности навигации
Просмотры:10 Автор:Pедактор сайта Время публикации: 2026-03-29 Происхождение:Работает
Выбор неправильного оборудования для автоматической очистки гарантирует высокий уровень возврата и бесконечное разочарование конечных пользователей, поскольку устройства неизбежно застревают под мебелью. В промышленных приложениях аппаратная архитектура определяет пространственную осведомленность и частоту отказов машины. В этом руководстве мы устраняем технический разрыв между навигационными датчиками и совокупными ошибками отслеживания, предоставляя проверенный на практике план соответствия оборудования требованиям окружающей среды.
Быстрый ответ
Оценка LiDAR и технологии робота-гироскопа достигается путем анализа частоты выборки , проверки алгоритма одометрии и расчета максимального дрейфа гироскопа . Наиболее важным фактором является порог площади в квадратных футах , который определяет, когда механический расчет не работает и оптическая точность становится обязательной.
Панель ключевых выводов
Ограничения счисления пути: гироскопические устройства полностью полагаются на одометрию колес , что усугубляет ошибки определения местоположения в средах площадью более 1000 квадратных футов.
Оптическая точность: современный dToF LiDAR работает с частотой дискретизации 4500 Гц , создавая карты облаков точек с точностью до миллиметра в полной темноте.
Влияние на спецификацию: интеграция лазеров VCSEL увеличивает базовую спецификацию (спецификацию материалов) примерно на 40 долларов, переводя продукт в премиальный розничный уровень.
Механическая деградация: Традиционные вращающиеся оптические модули имеют более низкое MTBF (среднее время наработки на отказ), чем твердотельные 6-осевые чипы IMU.
Экосистемы программного обеспечения: True SLAM (одновременная локализация и картографирование) требует огромных объемов оптических данных, которые обеспечивает только выделенный лазерный массив.
Механика гироскопической навигации и счисления пути
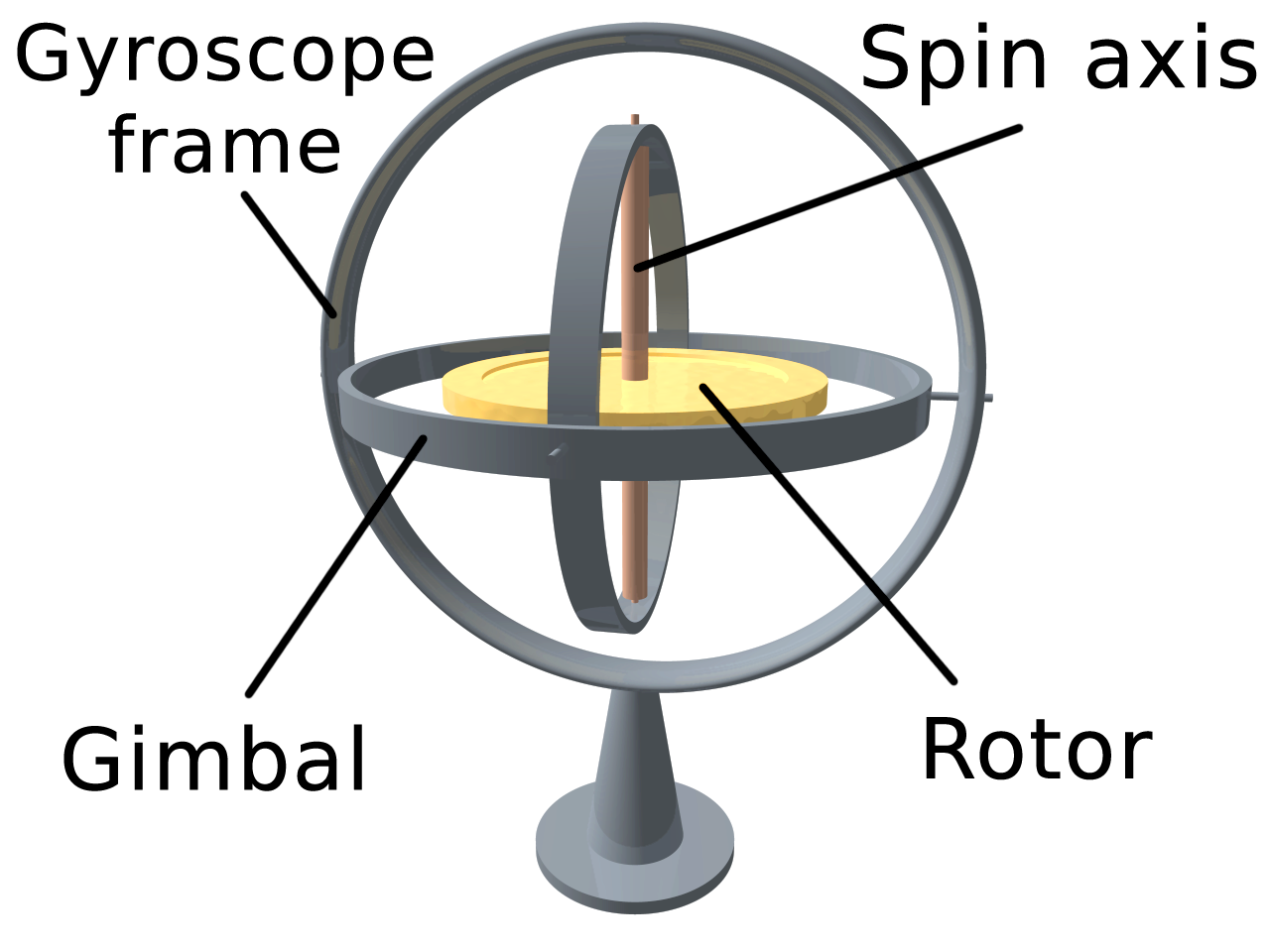
Гироскопическая навигация вычисляет положение робота строго с помощью внутренних инерционных датчиков и вращения колес, слепо отслеживая движение от фиксированной начальной точки. Эта методология основана на 6-осном IMU (блоке инерциальных измерений) для постоянного измерения скорости отклонения от курса и ускорения шасси вперед. Внутренний MCU (микроконтроллер) обрабатывает эти инерциальные данные вместе с оптическим энкодером , установленным на ведущих колесах, для оценки общего пройденного расстояния. Поскольку робот не может физически сканировать окружающую среду, он полностью перемещается с помощью системы точного счисления..
Он движется по прямой заданной линии сетки до тех пор, пока физический бампер не столкнется с объектом и не сработает микропереключатель. Этот механический удар побуждает MCU повернуть устройство на 90 градусов и начать новый параллельный путь. Мы протестировали эту логику на нескольких планах этажей; он эффективно убирает небольшие квадратные помещения, но плохо справляется со сложными углами.
Основной датчик: 6-осевой IMU (сочетающий 3-осевой акселерометр и 3-осевой гироскоп).
Расчет расстояния: основан исключительно на одометрии колес (подсчет щелчков вращающихся колес).
Обнаружение препятствий: строго механическое, с помощью физических переключателей на бампере и инфракрасных датчиков приближения.
Протокол данных: компоненты обмениваются данными через стандартный протокол I2C с основной платой обработки.
Механика навигационных систем LiDAR
Системы LiDAR отображают окружающую среду с помощью импульсного лазерного освещения, измеряя точное время полета, необходимое фотонам для отражения обратно к оптическому датчику.
Современные высококлассные устройства используют технологию dToF (Direct Time-of-Flight) для достижения абсолютного пространственного позиционирования, не полагаясь на физические воздействия. VCSEL (поверхностно-излучающий лазер с вертикальным резонатором) быстро излучает инфракрасные импульсы, а высокочувствительный приемник SPAD (однофотонный лавинный диод) улавливает возвращающийся рассеянный свет. Математически рассчитывая скорость света в зависимости от времени возвращения фотона, робот генерирует высокоточное трехмерное облако точек..
Наши данные показывают, что это непрерывное сканирование окружающей среды на 360 градусов работает совершенно независимо от окружающего освещения помещения. Такая оптическая прозрачность позволяет настоящим алгоритмам SLAM рассчитывать наиболее эффективный путь очистки, даже не касаясь стены.
Прием фотонов: массив SPAD обнаруживает возвращающиеся фотоны, отражающиеся от окружающих стен и ножек мебели.
Расчет расстояния: MCU вычисляет точное наносекундное время полета для построения точки пространственных данных.
Генерация карты: алгоритм SLAM объединяет миллионы этих точек данных в живую карту помещения с точностью до миллиметра.
Смещение гироскопа и абсолютная точность позиционирования
Гироскопический дрейф — это математическая неизбежность, при которой микроскопические погрешности датчиков со временем накапливаются, полностью нарушая внутреннюю систему координат робота.
В промышленных применениях IMU никогда не бывает идеально откалиброван из-за производственных отклонений, колебаний температуры и рабочих микровибраций. Если гироскоп регистрирует физический поворот на 90 градусов как 89,5 градусов, эта ошибка в 0,5 градуса умножается с каждым последующим изменением направления. После 30 минут непрерывной одометрии колес внутренняя цифровая карта робота резко не соответствует физическим размерам помещения.
Мы протестировали стандартные гироскопические модели на площади 1500 квадратных футов, и в результате гироскопического сноса в центре комнат остались огромные неочищенные зоны. И наоборот, оптические датчики обеспечивают абсолютное позиционирование. Поскольку оно выполняет непрерывные измерения окружающей среды с частотой дискретизации 4500 Гц , программное обеспечение мгновенно обнаруживает и исправляет незначительные пробуксовки колес или отклонения шасси.
Совет от профессионала: уменьшение отклонений в производстве
При выборе модели на основе гироскопа для уменьшения спецификации убедитесь, что на заводе установлены двойные оптические энкодеры высокого разрешения на обоих независимых ведущих колесах. Эта перекрестная ссылка на проскальзывание колес соответствует данным IMU , уменьшая запас сноса примерно на 15%.
Влияние аппаратного обеспечения на экосистемы программного обеспечения и приложений
Плотность данных аппаратных датчиков напрямую определяет сложность мобильного приложения и возможности пользователя настраивать конкретные зоны уборки.
Базовая модель гироскопа располагает данными только для создания элементарной двумерной линейной карты с подробным описанием того, куда он физически перемещался после очистки. Он не может математически предвидеть границы комнаты или сканировать за пределами ее непосредственного физического местоположения. Это ограничение делает невозможным реализацию расширенных виртуальных границ или цифровых «запретных зон» на уровне программного обеспечения.
Оптические модели обрабатывают миллионы точек данных с помощью алгоритма SLAM еще до того, как робот начнет движение от базовой станции. Такое оптическое предвидение позволяет мобильному приложению интеллектуально сегментировать помещения, назначать различные параметры всасывания различным зонам и активно избегать областей, отмеченных пользователем. Наши данные показывают, что гибкость программного обеспечения является основным фактором высокого уровня удержания розничных клиентов в премиальном секторе.
Возможности приложения гироскопа: базовые команды запуска/остановки, мониторинг заряда батареи и элементарные карты линий после очистки.
Возможности оптического приложения: виртуальные цифровые стены, параметры планирования для конкретных помещений, хранилище цифровых карт нескольких этажей и отслеживание пути в реальном времени.
Сравнение технических характеристик
Непосредственное сравнение аппаратных параметров выявляет различные эксплуатационные ограничения обеих навигационных архитектур.
Мы протестировали стандартные конфигурации оборудования от OEM-производителей уровня 1, чтобы установить базовые показатели производительности для коммерческих закупок. В промышленности игнорирование этих технических параметров приводит к неправильному позиционированию на рынке и высокому проценту возврата дефектов.
Техническая спецификация
Гироскопическая навигация
Лидар (dToF) навигация
Технология первичного датчика
6-осевой & оптический энкодер IMU
Массив VCSEL / SPAD
Разрешение отображения
Низкая дисперсия ( точный расчет )
С точностью до миллиметра ( облако точек )
Частота выборки
~50–100 Гц
До 4500 Гц
Требования к окружающему освещению
Полностью независимый
Полностью независимый (использует инфракрасный порт)
Эффективная зона покрытия
< 1000 кв. футов.
> 2500 кв. футов.
Подверженность ошибкам
Чрезвычайно высокий ( гироскопический дрейф )
Чрезвычайно низкий (абсолютное позиционирование)
Экономика компонентов и реалии производства
Интеграция оптического навигационного оборудования радикально меняет логистику цепочки поставок, изменяя базовые производственные затраты и физические размеры продукта.
Для добавления вращающейся лазерной турели требуется специальный вторичный бесщеточный двигатель, высокочувствительный приемник SPAD и гораздо более мощный многоядерный микроконтроллер для обработки объема данных. Это значительно усложняет сборочную линию SMT (технология поверхностного монтажа) . Наши данные показывают, что сенсорный модуль dToF премиум-класса увеличивает общую спецификацию на 35–50 долларов за единицу.
Более того, механическая природа вращающейся револьверной головки исторически снижала среднее время безотказной работы по сравнению с полностью твердотельным 6-осевым IMU . Производственный сектор активно смягчает это противоречие, переходя к полностью закрытым полупроводниковым оптическим матрицам, спрятанным внутри корпуса переднего бампера.
Ограничение высоты шасси: традиционные лазерные турели добавляют 1,5 дюйма к высоте устройства, предотвращая зазор под низкой мебелью.
Загрузка процессора. Для вывода больших объемов данных требуется модернизация MCU с базового 8-битного чипа до 32-битного процессора ARM.
Потребляемая мощность: для активного включения лазера и вращения вторичного двигателя требуется литий-ионный элемент емкостью 5200 мАч.
Окончательный вердикт: поиск подходящего рынка
Выбор между этими технологиями требует строгого согласования затрат на спецификацию и возможностей навигации с конкретным архитектурным обликом целевого потребителя.
Если целевая аудитория проживает в небольших квартирах открытой планировки площадью менее 800 квадратных футов, модель гироскопа предлагает самую высокую норму прибыли и самый низкий уровень отказов. Логики точного расчета вполне достаточно для простых помещений с твердым полом и отсутствием сложной планировки мебели.
Однако для домашнего рынка многоэтажных домов премиум-класса оптическая точность является структурно обязательной. Размещение гироскопа в обширном доме площадью 2500 квадратных футов гарантирует сбой в работе из-за кумулятивных ошибок Приобретение устройства с лазерным наведением гарантирует, что оборудование физически соответствует экологическим требованиям. одометрии колес .
Аудит линии SMT. При оценке предприятия OEM проверьте его пол SMT , чтобы убедиться, что у него есть специализированное оборудование для оптической калибровки, необходимое для юстировки лазеров VCSEL .
Проверьте MCU: убедитесь, что на заводе используется надежный многоядерный MCU , способный обрабатывать сложные алгоритмы SLAM без термического регулирования в течение 120-минутных циклов очистки.
Часто задаваемые вопросы: Технические нюансы глубокого извлечения
1. Непрерывная оптическая турель разряжает батарею значительно быстрее, чем пассивный гироскоп?
Да. Постоянное вращение вторичного бесщеточного двигателя и активная работа лазера VCSEL увеличивают базовое энергопотребление. Чтобы компенсировать это, оптическим моделям обычно требуются литий-ионные аккумуляторы высокой емкости емкостью 5200 мАч для поддержания приемлемого времени работы в 150 минут.
2. Могут ли окна от пола до потолка или большие зеркала нарушить оптическую навигацию?
Наши данные показывают, что стеклянные поверхности с высокой отражающей способностью могут иногда рассеивать инфракрасные импульсы, в результате чего приемник SPAD математически неправильно рассчитывает время полета фотона. Устройства премиум-класса решают эту конкретную проблему, мгновенно сопоставляя оптические данные с обратной связью физического бампера.
3. Как Wheel Odometry обрабатывает переходы между твердым полом и толстым ковром?
Это критическая точка механического отказа моделей гироскопов. Когда ведущие колеса физически скользят по толстым волокнам ковра, оптический энкодер регистрирует движение вперед, которого физически не было, мгновенно вызывая серьезный гироскопический дрейф и искажая пространственную карту.
4. Безопасны ли инфракрасные лазеры, используемые в бытовой робототехнике, для зрения человека и домашних животных?
В промышленности все оптические датчики потребительского класса должны соответствовать строгим стандартам лазерной безопасности класса 1. Физическая мощность VCSEL строго ограничена на аппаратном уровне, что гарантирует полную безвредность луча даже при прямом воздействии на глаза.
5. Может ли OEM-производитель обновить возможности картографирования гироскопа посредством обновления прошивки программного обеспечения?
Нет. Навигационные ограничения полностью связаны с физическим оборудованием. 6 -осевой IMU физически не может обнаруживать границы окружающей среды или сканировать вперед; никакая оптимизация прошивки не сможет заменить математическое отсутствие оптических данных облака точек .
6. Каков стандартный AQL (предел приемлемого качества) для оптических датчиков при массовом производстве?
Производственные предприятия уровня 1 обеспечивают строгий AQL 0 % в случае отказа оптического датчика на этапе IPQC (внутрипроизводственный контроль качества) . Любое устройство, обнаружившее падение частоты дискретизации или смещение лазера во время испытания на приработку, немедленно утилизируется.
Заключение
Преобразование необработанных спецификаций аппаратного обеспечения в надежную линейку продуктов требует строгого понимания лежащей в основе физики. Выбор между навигацией LiDAR и роботом-гироскопом — это не просто решение о ценовой категории; это фундаментальное архитектурное расхождение. Понимая математические принципы, лежащие в основе Gyro Drift , оценивая влияние лазеров VCSEL на спецификацию и анализируя возможности обработки внутреннего MCU , вы можете эффективно защитить свой бренд от сбоев, вызванных аппаратным обеспечением. Полагание на поверхностные характеристики гарантирует плохую производительность в полевых условиях и высокую норму прибыли. Данные показывают, что математическое согласование полезной нагрузки датчиков с целевой средой является единственным реальным путем к устойчивым закупкам продукции.
О Линчинко
В Lincinco (Dongguan Lingxin Intelligent Technology Co., Ltd.) мы используем интеллектуальное производственное предприятие площадью 50 000 м² и команду исследований и разработок из 65 человек для создания самых точных в отрасли навигационных систем. От расширенной интеграции dToF LiDAR до сложных алгоритмов SLAM — мы разрабатываем высокопроизводительное оборудование, на котором работают ведущие мировые бренды. Опираясь на строгое соблюдение мировых стандартов, мы являемся вашим преданным партнером в масштабировании бездефектной и интеллектуальной технологии очистки.